 Tech-Connect Tech-Connect est un site web proposant des actualités, des tutoriels, des astuces et un forum dans le domaine technologique, informatique, science, télécommunications, mobile, tablette, windows, mac os, linux, opensource, android et IOS.
Tech-Connect Tech-Connect est un site web proposant des actualités, des tutoriels, des astuces et un forum dans le domaine technologique, informatique, science, télécommunications, mobile, tablette, windows, mac os, linux, opensource, android et IOS. 
Tout a commencé avec une tortue serpentine et une bonne éducation
Burlington, Ontario, un soir d’été, quelque part dans la nature canadienne. Evan Budz, 15 ans, part camper avec ses parents. Et là, dans l’eau d’un lac voisin, il aperçoit une tortue serpentine qui nage.
Ce moment dure quelques secondes à peine. Pour la plupart des gens, c’est une anecdote sympathique vite oubliée.
Pour Evan Budz, c’est le point de départ d’une invention qui va lui valoir le premier prix du plus grand concours scientifique pour lycéens du monde, une récompense de 50 000 dollars, et les éloges de chercheurs professionnels qui travaillent depuis des décennies sur les problèmes qu’il vient de contribuer à résoudre.
« Mes parents m’ont élevé avec le principe que, chaque endroit que je visite, je devrais le laisser un peu meilleur que je ne l’ai trouvé », dit-il simplement. C’est une façon de voir le monde qui, manifestement, produit des résultats extraordinaires.
La tortue comme modèle d’ingénierie : l’intuition du génie
Quand Evan voit la tortue serpentine nager, il ne la regarde pas comme un animal. Il la regarde comme un ingénieur regarde un prototype.
« Quand j’ai vu la tortue serpentine, elle était tellement gracieuse, fluide et généralement non perturbatrice pour son environnement », se souvient-il. « J’ai pensé que ce serait vraiment intéressant d’essayer de répliquer sa cinématique de nage naturelle dans un robot. »
La cinématique. C’est le vocabulaire technique qui désigne l’étude du mouvement des corps, sans considération des forces qui le produisent. Evan Budz utilise ce terme naturellement, à 15 ans, en parlant d’une tortue.
Mais l’intuition derrière ce choix est plus profonde qu’une fascination technique. C’est une observation environnementale concrète que les ingénieurs adultes auraient pu faire des années plus tôt.
Le problème des robots sous-marins existants
La majorité des technologies sous-marines actuelles utilisent des hélices ou des jets d’eau sous haute pression pour se propulser. Ces mécanismes fonctionnent bien pour les missions industrielles : inspection de pipelines, cartographie des fonds marins, récupération d’objets. Mais dans des environnements fragiles ?
Evan l’explique directement : « La plupart des technologies sous-marines actuelles peuvent produire des bruits provenant de leurs hélices ou des flux d’eau à très haute pression », qui peuvent éroder les écosystèmes, perturber la faune marine et détruire des récifs coralliens déjà fragilisés.
C’est le paradoxe auquel se heurtent les biologistes marins : pour surveiller des environnements delicats, ils doivent y envoyer des engins qui les endommagent. Un peu comme si on voulait observer des oiseaux rares en envoyant un hélicoptère au-dessus de leur nid.
La tortue de mer, elle, n’a pas ce problème. Elle nage depuis 100 millions d’années dans les océans de la Terre, et n’a jamais érodé un récif corallien.
Construire BURT : de l’observation à l’ingénierie
Les premières étapes de recherche
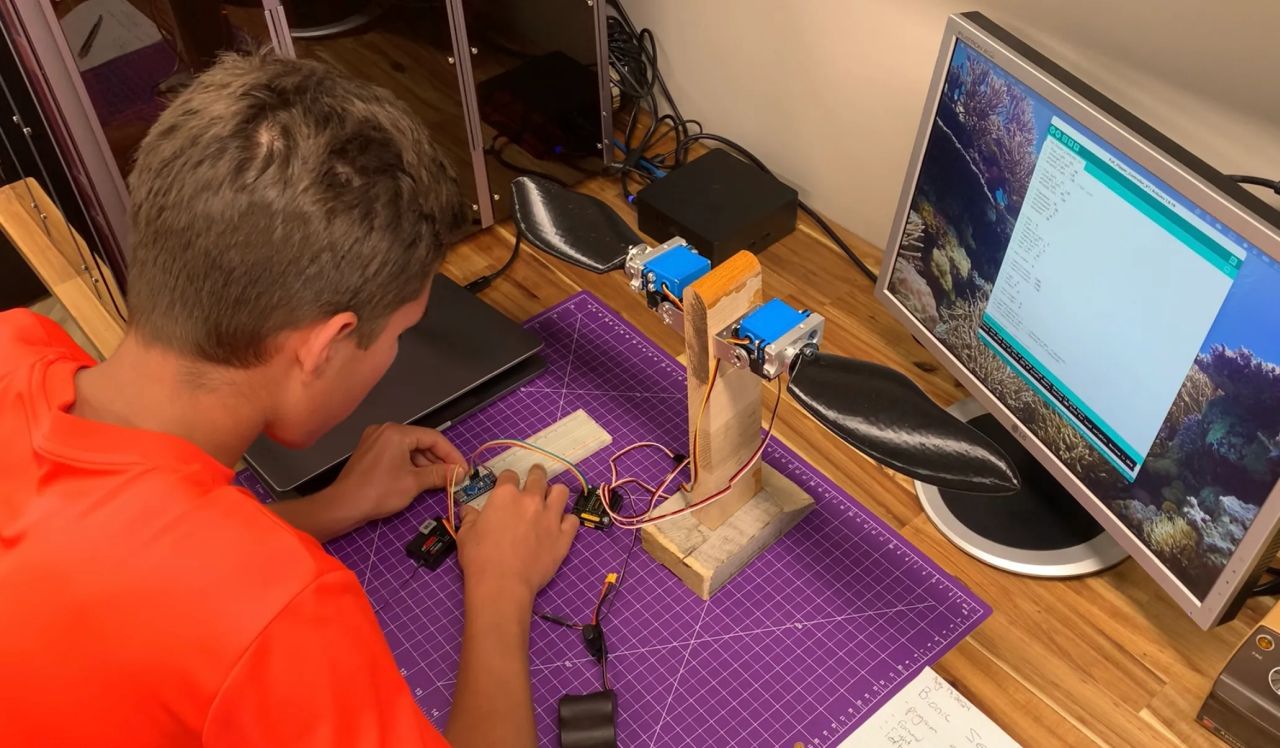
Avant de toucher un tournevis ou d’ouvrir un logiciel de CAO, Evan commence par étudier son modèle biologique avec la rigueur d’un chercheur.
Il regarde des heures de vidéos de tortues de mer en mouvement, en particulier la tortue verte (Chelonia mydas), reconnaissable à ses grandes nageoires antérieures élancées. Il analyse comment ces reptiles utilisent leurs membres différemment selon leur fonction :
- Les nageoires antérieures (larges, puissantes) assurent la propulsion principale, avec des battements lents et amples qui génèrent une traction durable.
- Les nageoires postérieures (plus courtes, plus fines) servent principalement à la stabilisation et aux changements de direction.
Il complète ces observations en rencontrant des experts de l’aquarium local, qui lui expliquent les nuances de la locomotion aquatique des chéloniens. Cette phase de recherche est fondamentale : on ne peut pas copier fidèlement ce qu’on n’a pas compris en profondeur.
SolidWorks et la conception 3D
Fort de sa compréhension de la biomécanique testudienne, Evan se tourne vers SolidWorks, un logiciel de conception assistée par ordinateur (CAO) utilisé par des ingénieurs professionnels dans l’aéronautique, l’automobile et la construction navale.
Choisir SolidWorks plutôt qu’un outil grand public n’est pas anodin. C’est un logiciel de niveau professionnel qui permet de modéliser des pièces mécaniques complexes, de simuler des contraintes physiques, et d’exporter directement vers des imprimantes 3D avec une précision millimétrique.
Dans SolidWorks, Evan dessine chaque composant de la future tortue robotique, en respectant scrupuleusement les proportions nageoires-carapace d’une vraie tortue de mer mais à une échelle réduite pour faciliter la maniabilité dans différents environnements.
L’anatomie de BURT : ce qui se cache à l’intérieur
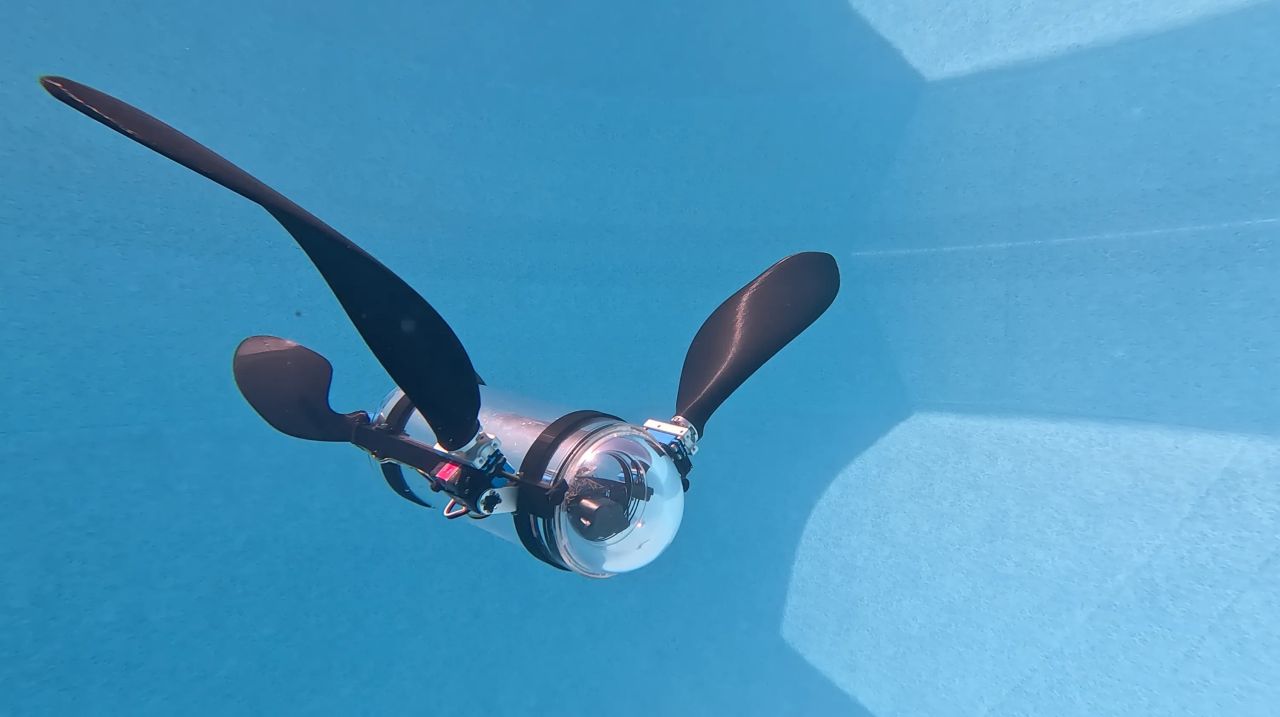
BURT, pour Bionic Underwater Robotic Turtle, est un concentré de technologie dans une coque qui ressemble à une véritable tortue. Voici ce qui se cache sous la carapace :
La structure physique :
- 4 nageoires imprimées en 3D : deux grandes nageoires avant (propulsion) et deux petites nageoires arrière (stabilisation et direction), dont les mouvements oscillatoires sont contrôlés individuellement par des servomoteurs.
- Un tube principal en acrylique transparent : le « corps » du robot, qui protège des eaux tous les composants électroniques sensibles.
- Poids total : environ 5 kilogrammes, dont une partie est constituée de lest métallique ajouté délibérément pour obtenir la flottabilité neutre.
Les cerveaux électroniques :
- Un Raspberry Pi, un ordinateur miniature de la taille d’une carte de crédit, sert de processeur central. C’est lui qui exécute les modèles d’IA, gère les capteurs, et contrôle les mouvements des nageoires.
- Des modèles d’intelligence artificielle entraînés sur mesure permettent la reconnaissance et la classification des menaces environnementales en temps réel.
La navigation autonome :
- Un module GPS pour le positionnement et le suivi de trajectoire : BURT peut suivre un quadrillage prédéfini d’une zone à surveiller.
- Des capteurs de profondeur et de pression pour le contrôle de l’immersion.
- Un sonar à ultrasons pour la détection d’obstacles dans les eaux troubles.
- Des lumières frontales pour fonctionner dans des eaux peu lumineuses.
La détection environnementale :
- Une caméra frontale pour la surveillance visuelle en temps réel.
- Des capteurs de qualité de l’eau pour détecter les anomalies chimiques.
- Et la plus récente innovation : une caméra holographique 3D pour la détection des microplastiques.
La flottabilité neutre : le défi physique qu’Evan a dû résoudre
Une tortue robotique qui coule ou qui remonte à la surface n’est d’aucune utilité pour surveiller des récifs coralliens. Evan a dû résoudre un problème de physique fondamental : obtenir la flottabilité neutre, c’est-à-dire faire en sorte que BURT ne monte ni ne descende spontanément dans l’eau.
Le principe d’Archimède appliqué à un robot
Pour les non-initiés : selon le principe d’Archimède, tout objet immergé dans un fluide subit une poussée verticale vers le haut égale au poids du fluide déplacé. Si un objet est plus léger que le fluide déplacé, il monte. S’il est plus lourd, il coule. S’il est exactement au même poids, il reste en suspension, c’est la flottabilité neutre.
« Pour obtenir la flottabilité neutre dans l’eau », explique Evan, « j’avais besoin que la tortue soit fondamentalement plus lourde que la force de flottabilité qui la pousse vers le haut. »
En ajoutant du lest métallique précisément calibré dans la structure de BURT, il a pu ajuster son poids jusqu’à obtenir exactement le bon équilibre : ni trop léger pour flotter en surface, ni trop lourd pour couler au fond.
Autonomie et énergie
BURT fonctionne sur une batterie lithium qui lui offre jusqu’à 8 heures d’autonomie continue par charge, suffisant pour une mission de surveillance complète d’une zone récifale ou d’une section de lac.
Pour les missions prolongées, un panneau solaire intégré dans la conception peut recharger la batterie pendant les heures de présence en surface, étendant considérablement la durée opérationnelle.
Concernant la vitesse, BURT nage actuellement à environ 0,8 km/h, la vitesse naturelle d’une tortue de mer en croisière. « Si je veux qu’elle nage plus vite, je peux simplement changer la fréquence d’oscillation des nageoires », précise Evan, en faisant référence au rythme des battements des nageoires. La technologie permet donc d’adapter la vitesse selon les besoins opérationnels.
Ce que BURT peut détecter : une liste de menaces qui donne à réfléchir
La question centrale est celle-ci : une fois dans l’eau, que peut réellement faire BURT ? La réponse est plus impressionnante qu’on ne pourrait le croire pour un robot conçu dans une chambre d’adolescent.
🌊 Le blanchissement corallien
Le blanchissement corallien est l’un des phénomènes les plus destructeurs pour les écosystèmes marins tropicaux. Il survient quand la température de l’eau monte trop souvent à cause du changement climatique, forçant les coraux à expulser les algues symbiotiques qui vivent dans leurs tissus et leur donnent leur couleur. Sans ces algues, les coraux deviennent blancs et meurent si les conditions ne reviennent pas rapidement à la normale.
BURT a été programmé pour reconnaître visuellement les signes de blanchissement. Evan a créé des modèles 3D de coraux à différents stades de blanchissement et a entraîné son réseau de neurones artificiel à les reconnaître et les classifier. Lors des tests dans la piscine de ses grands-parents, il a simulé des formations coralliennes et observé BURT les identifier avec précision.
🐟 Les espèces invasives
Une espèce invasive est un organisme introduit dans un écosystème où il n’est pas naturellement présent, généralement par l’activité humaine, et qui y prolifère au détriment des espèces locales. En Amérique du Nord, la carpe asiatique, la moule zébrée, ou le gobie à taches rondes ont causé des dommages considérables aux écosystèmes lacustres.
BURT peut être entraîné à reconnaître les profils visuels d’espèces cibles en utilisant des bases de données biologiques pour construire les ensembles de données d’apprentissage de son IA.
🔬 Les microplastiques : la grande nouveauté de 2026
C’est la fonctionnalité la plus récente et la plus impressionnante de BURT, qui a valu à Evan son prix de 50 000 dollars au Regeneron ISEF 2026.
Les microplastiques sont des fragments de plastique mesurant moins de 5 millimètres et souvent bien en dessous du millimètre. Ils proviennent de la dégradation des déchets plastiques dans les environnements aquatiques, du lessivage des vêtements synthétiques lors du lavage, et de l’usure des pneus sur les routes. Ces particules sont omniprésentes dans tous les océans, lacs et rivières du monde. On en a retrouvé dans les glaces de l’Arctique, à plus de 10 000 mètres de profondeur dans la fosse des Mariannes, et dans le sang humain.
Le problème pour les chercheurs : les méthodes actuelles de détection des microplastiques sont coûteuses, lentes, et nécessitent de ramener des échantillons en laboratoire pour analyse. Il n’existe pratiquement aucun système capable de les détecter en temps réel, sur place, dans leur milieu naturel.
Evan a développé une solution élégante : une caméra holographique 3D montée sur BURT. La holographie 3D permet de capturer les caractéristiques structurelles tridimensionnelles de particules minuscules : leur forme, leur réflectivité, leur texture. Un réseau de neurones artificiel entraîné sur mesure analyse ensuite ces images holographiques pour classifier chaque particule : microplastique ou matière organique naturelle ?
Les résultats : BURT peut détecter des microplastiques dont la taille est inférieure à celle d’un globule rouge, avec un taux de précision de 94 %. C’est un résultat que bien des laboratoires universitaires envieraient.
Les récompenses : une trajectoire exceptionnelle
L’histoire de BURT et de son créateur est une succession de consécrations qui méritent d’être listées chronologiquement pour en mesurer l’ampleur.
Juin 2025 : Expo-sciences canadienne
Lors de l’Expo-sciences pancanadienne (CWSF : Canada-Wide Science Fair) à Fredericton, environ 25 000 participants s’affrontent dans des compétitions régionales pour se qualifier. Parmi les finalistes nationaux, Evan remporte le Prix du meilleur projet dans la catégorie Innovation pour son robot tortue.
Ce prix lui vaut également l’Ellison Scholars Award : une récompense qui inclut un voyage entièrement payé à l’Université d’Oxford au Royaume-Uni pour rencontrer des chercheurs et participer à des ateliers scientifiques.
Septembre 2025 : Concours de l’Union européenne pour jeunes scientifiques (EUCYS)
Le EUCYS (European Union Contest for Young Scientists) est l’une des compétitions scientifiques les plus prestigieuses pour les adolescents en Europe, réunissant les meilleurs projets de 40 pays.
Organisé en 2025 en Lettonie, le concours voit Evan remporter la première place battant des centaines de jeunes scientifiques européens avec son projet de robot tortue bionique pour la surveillance écologique.
Mai 2026 : Regeneron ISEF, Phoenix, Arizona
Le Regeneron International Science and Engineering Fair (ISEF) est tout simplement la plus grande et la plus prestigieuse compétition scientifique pour lycéens au monde. En 2026, 1 727 finalistes de 67 pays, régions et territoires s’affrontent à Phoenix, en Arizona, pour des prix totalisant plus de 7 millions de dollars.
Evan, représentant le Canada dans la délégation de Sciences Jeunesse Canada, présente sa version améliorée de BURT enrichie de la caméra holographique 3D pour la détection des microplastiques.
Il repart avec :
- Le Prix Gordon E. Moore pour des résultats positifs pour les générations futures : la récompense de 50 000 dollars la plus importante de la compétition.
- Le Premier Grand Prix en Génie environnemental : la première place dans sa catégorie disciplinaire.
- Deux prix spéciaux supplémentaires.
Pour contextualiser : le Prix Gordon E. Moore nommé en l’honneur du cofondateur d’Intel et inventeur de la « loi de Moore » sur la miniaturisation des puces est décerné à un seul projet parmi 1 727. C’est l’équivalent d’une médaille d’or olympique dans le monde de la science lycéenne.
Les phases de test : une tortue en piscine, puis dans le lac Ontario
Les débuts dans la piscine des grands-parents
La majeure partie du développement initial de BURT s’est déroulée dans la piscine des grands-parents d’Evan, qui offre une profondeur d’un peu plus de 2,4 mètres, suffisante pour tester les mécanismes de base.
Pour simuler un environnement récifal, Evan a imprimé en 3D des modèles de coraux à différents stades de santé, les a installés dans la piscine, et a programmé BURT pour les identifier. Il a observé les comportements de classification de son IA, affiné les paramètres, et itéré jusqu’à obtenir des résultats cohérents.
C’est du développement logiciel appliqué à l’écologie, réalisé dans un cadre domestique avec de la créativité et de la persévérance.
Le défi des eaux troubles
En passant à des tests en conditions réelles, Evan a rencontré un problème : les eaux naturelles ne sont pas aussi limpides que l’eau de piscine traitée. Turbidité, végétation, variations de lumière, tout cela affecte la qualité des images capturées par la caméra de BURT.
Sa réponse : installer des lumières frontales sur le robot pour éclairer artificiellement la zone devant lui, et ajouter un transducteur à ultrasons qui utilise des ondes sonores à haute fréquence pour détecter les obstacles même quand la visibilité visuelle est nulle.
Lake Ontario : la vérité du terrain
Le test ultime a eu lieu dans le lac Ontario, l’un des Grands Lacs nord-américains, un écosystème complexe confronté à de nombreuses menaces, dont justement les microplastiques et les espèces invasives. BURT y a nagé, collecté des données, et démontré sa capacité à fonctionner dans un vrai milieu naturel.
Prochaine étape selon Evan : tester la profondeur maximale atteignable par BURT et affiner son comportement dans des conditions environnementales encore plus variables.

La biomimétique : s’inspirer du vivant pour innover
Ce qu’Evan Budz a réalisé avec BURT s’inscrit dans un domaine de recherche scientifique reconnu et en plein essor : la biomimétique (ou bio-inspiration).
Le principe est simple mais puissant : la nature a eu des millions d’années pour optimiser des solutions à des problèmes d’ingénierie. Pourquoi ne pas s’en inspirer ?
Des exemples célèbres de biomimétique
- Le Velcro : inventé en 1941 par Georges de Mestral après avoir observé comment les bardanes s’accrochaient aux poils de son chien.
- Le train à grande vitesse Shinkansen au Japon : le nez du train a été redessiné pour imiter le bec du martin-pêcheur, permettant d’entrer dans les tunnels sans créer de vague de pression sonore.
- Les combinaisons de natation Speedo : inspirées de la texture de peau de requin, qui réduit la traînée hydrodynamique.
- Les sonar biologiques : les systèmes sonar des sous-marins s’inspirent directement de l’écholocation des dauphins et des chauves-souris.
BURT s’inscrit dans cette tradition. La tortue de mer, dont la lignée remonte à 100 millions d’années, a développé une nage à la fois efficace, silencieuse et non perturbatrice pour son environnement. Ce sont exactement les propriétés qu’un robot de surveillance environnementale doit avoir.
Pourquoi ce projet est important au-delà de la prouesse technique
Ce serait une erreur de réduire BURT à un exploit technique d’adolescent surdoué. Le projet soulève des questions environnementales très concrètes.
La crise des microplastiques
Les microplastiques représentent l’une des pollutions les plus insidieuses de notre époque. Ils ont été retrouvés dans les organismes de 94 % des espèces marines étudiées. Dans le corps humain, on les a détectés dans le sang, les poumons, le placenta, et même dans les cerveaux. Les effets à long terme sur la santé humaine et les écosystèmes sont encore mal compris, précisément parce que les méthodes de détection et de quantification sont insuffisantes.
BURT apporte une réponse concrète à ce manque : une plateforme mobile, autonome, et peu coûteuse qui peut surveiller en continu les concentrations de microplastiques dans des milieux aquatiques, quelque chose qu’aucun laboratoire au sol ne peut faire de manière aussi flexible et continue.
Le blanchissement corallien : une urgence planétaire
Les récifs coralliens couvrent moins de 1 % des fonds marins, mais abritent plus de 25 % de toutes les espèces marines. Ils sont en train de disparaître à une vitesse alarmante : 50 % des récifs coralliens du monde ont disparu depuis les années 1950, et les projections actuelles suggèrent que 90 % des coraux restants pourraient mourir d’ici 2050 si le réchauffement climatique continue au rythme actuel.
Une détection précoce du blanchissement est cruciale, elle permet aux gestionnaires d’écosystèmes d’intervenir rapidement avant que le dommage soit irréversible. BURT peut patrouiller des zones récifales 24h/24, sans se fatiguer, sans nuire au milieu qu’il surveille.
La voie suivie par Evan : autodidacte, curieux, méthodique
Un dernier point mérite d’être souligné : Evan Budz n’est pas dans un lycée spécialisé pour génies. Il est élève de 10e année (l’équivalent de la seconde française) dans un lycée ordinaire de Burlington, Ontario.
Son expertise en SolidWorks, en programmation de microcontrôleurs, en réseaux de neurones artificiels, en holographie et en impression 3D, il l’a construite lui-même, par curiosité, par passion, et avec le soutien de sa famille qui l’a encouragé à transformer ses observations en projets concrets.
Les 50 000 dollars qu’il a remportés au Regeneron ISEF seront réinvestis dans le développement de BURT pour améliorer ses capteurs, étendre ses capacités de détection, et peut-être, un jour, en faire une véritable plateforme de surveillance écologique déployable à grande échelle.
L’innovation pour l’environnement devrait-elle être au cœur de l’éducation scientifique ?
L’histoire d’Evan Budz et de BURT me frappe pour une raison qui dépasse largement la prouesse technique.
Un garçon de 15 ans, animé par un principe simple appris de ses parents (« laisse chaque endroit un peu meilleur que tu ne l’as trouvé »), observe une tortue nager, et décide de construire quelque chose qui peut aider à protéger les océans. Sans subvention, sans laboratoire institutionnel, sans équipe de recherche. Juste de la curiosité, de la rigueur, et des outils accessibles. Et il y arrive.
Ce qui me semble important dans cette histoire, c’est que la motivation n’est pas abstraite. Elle est ancrée dans une relation directe avec la nature, des activités de plein air, une attention portée au monde vivant, une éducation qui valorise la responsabilité environnementale.
Les systèmes éducatifs qui forment les scientifiques de demain ont souvent tendance à valoriser la performance technique pure : les olympiades de mathématiques, les concours de programmation, les notes en physique. C’est important, évidemment. Mais sans une connexion à des problèmes réels et à un sens de la responsabilité, ces compétences restent des outils sans direction.
BURT est la démonstration que combiner une formation technique solide avec un ancrage dans des enjeux environnementaux concrets peut produire des innovations d’une portée réelle.
Comment intégrer davantage cette approche dans nos programmes scolaires, pour que des milliers d’Evan Budz puissent exprimer leur potentiel et pas seulement ceux qui ont la chance d’avoir les bons parents, les bons outils, et la bonne curiosité au bon moment ?
Source : CBC
